Tutorial Various Optimizations: Difference between revisions
Update PDF link |
|||
| (One intermediate revision by one other user not shown) | |||
| Line 30: | Line 30: | ||
[[File:partial_state_space_por.png]] | [[File:partial_state_space_por.png]] | ||
Using this observation the ordinary model checker of ProB has been extended to check a model formalized in B or Event-B using partial order reduction. More information about the implementation of POR in ProB and the theoretical background of POR can be read [ | Using this observation the ordinary model checker of ProB has been extended to check a model formalized in B or Event-B using partial order reduction. More information about the implementation of POR in ProB and the theoretical background of POR can be read [https://www3.hhu.de/stups/downloads/pdf/DobrikovLeuschelPORtechreport.pdf here]. Our implementation of POR uses the ample set theory <ref>E.M. Clarke, O. Grumberg, M. Minea, and D. Peled: ''State Space Reduction using Partial Order Reduction''. STTT '98, 3, pages 279-287</ref>. | ||
For enabling the POR optimization for the model checker in Tcl/Tk interface of ProB a new check box “Partial Order Reduction” has been added to the “Model Checker” menu. Note that the option shows up only when the user mode is set to “Normal” (see Preferences → User Mode in the menu bar). The POR optimization can be enabled for model checking B and Event-B models with the command line version of ProB by setting the 'por' preference to the value 'ample_sets'. For example, the machine ''Example'' can be checked for deadlock and invariant violations using the POR optimization with the command line version of ProB as follows: | For enabling the POR optimization for the model checker in Tcl/Tk interface of ProB a new check box “Partial Order Reduction” has been added to the “Model Checker” menu. Note that the option shows up only when the user mode is set to “Normal” (see Preferences → User Mode in the menu bar). The POR optimization can be enabled for model checking B and Event-B models with the command line version of ProB by setting the 'por' preference to the value 'ample_sets'. For example, the machine ''Example'' can be checked for deadlock and invariant violations using the POR optimization with the command line version of ProB as follows: | ||
| Line 94: | Line 94: | ||
To sum up, in order to take an advantage of POR the model being checked should have many independent operations that are concurrently executed. In other words, the magnitude of reduction depends on the coupling between the operations in the B model. Thus, it is recommended to use the reduced search when the analyzed model has comparatively many independent operations that are concurrently executed in order to gain from the improvement by the reduction technique. For example, if a B model has no pair of independent operations or all independent operations are not executed concurrently, i.e. two independent operations are never simultaneously enabled, then no reductions of the state space will be performed using the reduced search algorithm. | To sum up, in order to take an advantage of POR the model being checked should have many independent operations that are concurrently executed. In other words, the magnitude of reduction depends on the coupling between the operations in the B model. Thus, it is recommended to use the reduced search when the analyzed model has comparatively many independent operations that are concurrently executed in order to gain from the improvement by the reduction technique. For example, if a B model has no pair of independent operations or all independent operations are not executed concurrently, i.e. two independent operations are never simultaneously enabled, then no reductions of the state space will be performed using the reduced search algorithm. | ||
The reduction algorithm has been evaluated on various B and Event-B models. The evaluation can be obtained [ | The reduction algorithm has been evaluated on various B and Event-B models. The evaluation can be obtained [https://www3.hhu.de/stups/internal/benchmarks/por/ here]. | ||
== Partial Guard Evaluation == | == Partial Guard Evaluation == | ||
| Line 255: | Line 255: | ||
In all test cases except for 'All Enabled' and 'Cruise Control' model checking with PGE has provided better performance results than model checking without PGE. The results show that partial guard evaluation can improve model checking up to factor 2. The larger the state space the higher is the possibility for better performance in model checking B models. For example, for 'CAN BUS' the optimisation could speed up model checking to factor 2, whereas for the 'Crusie Control' model no improvement could be detected although a significant number of guard evaluations could be saved up. | In all test cases except for 'All Enabled' and 'Cruise Control' model checking with PGE has provided better performance results than model checking without PGE. The results show that partial guard evaluation can improve model checking up to factor 2. The larger the state space the higher is the possibility for better performance in model checking B models. For example, for 'CAN BUS' the optimisation could speed up model checking to factor 2, whereas for the 'Crusie Control' model no improvement could be detected although a significant number of guard evaluations could be saved up. | ||
These and various other benchmarks used for evaluating partial guard evaluation (PGE) can be viewed [ | These and various other benchmarks used for evaluating partial guard evaluation (PGE) can be viewed [https://www3.hhu.de/stups/internal/benchmarks/pge/ here]. | ||
== References == | == References == | ||
<references /> | <references /> | ||
Latest revision as of 17:11, 4 February 2021
The ordinary model checker of ProB enables the user to verify automatically whether a B model contains any errors such as deadlocks and invariant violations. The search for errors is performed by a graph traversal algorithm exploring the state space until an error state has been found or all states of the model have been explored. The runtime of the model checker is mostly determined by the number of states of the model being analyzed and thus model checking is generally limited by the size of the state space of the model. The problem is also known as the state space explosion problem.
To combat the state space explosion problem two advantageous techniques, partial guard evaluation and partial order reduction, for the ordinary model checker of ProB have been implemented for model checking practically B and Event-B models with huge state spaces. This tutorial describes how one can apply model checking using the optimizations and additionally gives hints when it is recommendable to use these optimizations.
Partial Order Reduction
Partial order reduction (POR) is a method proposed for combating the state space explosion problem by means of state space reduction. The technique takes advantage of the commutativity of concurrently executed actions. The reduction relies on selecting a subset of all enabled actions in each reachable state of the state space aiming in this way to reduce the number of possible orderings of actions. Basically, the idea is to check only a fragment of the original state space that is sufficient for checking the given property.
Take, for example, the following B machine:
MACHINE Example VARIABLES x,y,z INVARIANT x:INT & y:INT & z:INT INITIALISATION x,y,z:=0,0,0 OPERATIONS IncX = PRE x=0 THEN x:= x+1 END; IncY = PRE y=0 THEN y:= y+1 END; IncZ = PRE z=0 THEN z:= z+1 END END
The machine has a deadlock state. The deadlock state will be reached by executing each of the operations IncX, IncY, and IncZ. The order of executing the operations is irrelevant with respect to reaching the deadlock state. This can be seen, for example, by observing the full state space of the machine:

Since the order in which the operations are executed is not relevant for discovering the deadlock state it is sufficient to examine only one of the six possible paths that start in the initial state and reach the deadlock. Thus, for the machine it is enough to analyze only one arbitrary order of the events in order to detect the deadlock:

Using this observation the ordinary model checker of ProB has been extended to check a model formalized in B or Event-B using partial order reduction. More information about the implementation of POR in ProB and the theoretical background of POR can be read here. Our implementation of POR uses the ample set theory [1].
For enabling the POR optimization for the model checker in Tcl/Tk interface of ProB a new check box “Partial Order Reduction” has been added to the “Model Checker” menu. Note that the option shows up only when the user mode is set to “Normal” (see Preferences → User Mode in the menu bar). The POR optimization can be enabled for model checking B and Event-B models with the command line version of ProB by setting the 'por' preference to the value 'ample_sets'. For example, the machine Example can be checked for deadlock and invariant violations using the POR optimization with the command line version of ProB as follows:
$ probcli Example.mch -mc 10000 -p por ample_sets ********* DETERMINE ACTION DEPENDENCIES AND ENABLE GRAPH ************* ********** FINISHED ANALYSIS ************* Analysis Checking Time: 10 ms. ALL OPERATIONS COVERED found_error(deadlock,3) finding_trace_from_to(root) Model Checking Time: 40 ms (100 ms walltime) States analysed: 3 Transitions fired: 4 *** COUNTER EXAMPLE FOUND *** deadlock *** TRACE: 1: INITIALISATION(0,0,0): 2: IncZ: 3: IncX: 4: IncY: ! *** error occurred *** ! deadlock
As a result the deadlock has been discovered by exploring in total 3 states using the Mixed DF/BF search strategy. Model checking the machine without using POR will possibly explore more states until it finds out the deadlock state (recall that the full state space of Example.mch consists of 8 states). Note that the POR algorithm can be applied to all exploration strategies (DF, BF, and Mixed DF/BF) of the ordinary model checker of ProB.
The reduction of the state space takes effect by choosing a subset of the set of all enabled transitions in the currently explored state. The set of all enabled transitions in some state s is usually denoted by enabled(s) and the subset of the transitions chosen to be executed in s is denoted by ample(s). The set ample(s) we call an ample set for state s. Each ample set should satisfy certain conditions (the ample set requirements) in order to guarantee that the reduction of the state space is sound in regard to the property being checked on the model. In fact, there are four conditions that each ample set should satisfy:
- (A 1) ample(s) = {} <=> enabled(s) = {}
- (A 2) Along every finite execution in the original state space starting in s, an event dependent on ample(s) cannot appear before some event from ample(s) is executed
- (A 3) If ample(s) is a proper set of enabled(s), then each transition in ample(s) is a stutter transition.
- (A 4) For any cycle C in the reduced state space, if a state in C has an enabled event e, then there exists a state s in C such that e is an element of ample(s).
To guarantee that all deadlocks in the full state space are also preserved in the reduced state space it is sufficient when all computed ample sets satisfy just the first two conditions <citation needed>. This suggests that in some cases, when we check for deadlock freedom only, the reduction of the state space may be more effective if each ample set satisfies only the first two ample set requirements. That is, model checking with POR usually tends to yield more state space reduction when checking a model for deadlock freedom only than checking it for invariant violations or simultaneously for deadlock freedom and invariant violations. (The reduction algorithm of ProB has been adapted to this fact.) For this reason, keep in mind to disable the “Invariant Violations” option if it is intended to check a B or Event-B model just for deadlocks using the POR optimization as the potential for more significant reduction of the state space is higher.
The reduction algorithm makes use of the independence of transitions. Two transitions Op1 and Op2 are called independent if for each state s where both are enabled we have the following situation:

Let us assume that the transitions Op1 and Op2 in the Figure above constitute the executions of two deterministic operations of a B machine. Then we can say that the operations Op1 and Op2 are independent, when they cannot disable one other and additionally both possible orders of execution of the operations and starting in some state reach the same state . If two transitions are not independent, then both are denoted as dependent.
To find out whether two operations are independent one can analyze the syntactical structure of both operations. If each of the operations modifies variables of the machine not read by the other one and if both operations modify different variables, then these operations are considered to be independent. Besides performing only a syntactical analysis, we use also the constraint-based facilities of ProB to determine more exact relations between the operations. The reason for those extra analyzes lies in the high potential for significant reduction of the state space when the degree of independence of the checked B model is high.
Thus, if we have a great amount of independent operations for some B machine, then we have a great potential for significant state space reduction. The results of the analyses for determining the independence of operations for a particular B machine, which are used by the reduction algorithm for computing the ample sets, can be viewed in the menu bar of the Tcl/Tk interface of ProB: “Verify → Enabling Analysis → Dependence Analysis (Table)”. For example, the dependency table for the model 'Example.mch' looks as follows:

The results in the dependency table for a pair of operations Op1 and Op2 have the following meanings:
- syntactic_independent : Op1 and Op2 are syntactically independent; both events write different variables and no one of the events can write a variable which is read by the other one
- independent : one of the events or both events write variables read only in the guard of the other one, though the events cannot disable each other
- dependent : the events are not independent
- race_dependent : Op1 and Op2 have write variables in common
- - : the dependency relation is symmetric, see (Op2,Op1) result
- = : Op1 and Op2 represent the same event
To sum up, in order to take an advantage of POR the model being checked should have many independent operations that are concurrently executed. In other words, the magnitude of reduction depends on the coupling between the operations in the B model. Thus, it is recommended to use the reduced search when the analyzed model has comparatively many independent operations that are concurrently executed in order to gain from the improvement by the reduction technique. For example, if a B model has no pair of independent operations or all independent operations are not executed concurrently, i.e. two independent operations are never simultaneously enabled, then no reductions of the state space will be performed using the reduced search algorithm.
The reduction algorithm has been evaluated on various B and Event-B models. The evaluation can be obtained here.
Partial Guard Evaluation
When checking for consistency a B model the ProB model checker traverses the state space of the model beginning in some of the initial states and checks for errors each state, which it encounters. The ProB model checker explores the state space of the B machine by applying all operations of the machine to the current state. As a result, the successor states of the state are determined. The exploration of the state space continues until all possible states are explored or an error state is found.
When a state, say s, is processed the following steps are consequently performed:
- Checking s for errors like invariant violation, assertion violation, and deadlock;
- Applying the machine's operations to s.
The second step is carried out in case no error was discovered previously (in step 1). When step 2. is performed in some state s all operations of the checked B model are tested for being enabled in s and the substitutions of each enabled operation are performed at s.
The effort of checking a state amounts thus to checking the state for errors (testing for invariant violation, assertion violations etc.) plus the computation of the successors. There is some redundancy in testing all operations' guards in each state, as usually there are operations that are disabled in the states being explored. Especially, when the model checker has to check exhaustively B models with large state spaces the effort of testing the guard of each operation in every state may be huge. Thus, an optimization may be considered by means of decreasing the state space exploration complexity by trying to reduce the overall number of guard tests via skipping the guard evaluations of operations known to be disabled in some states.
One can determine a set of disabled operations in a state s by considering, for example, the incoming transitions of s. During the observation of the incoming transitions we examine how the operations represented by the incoming transitions may influence other operations. If, for example, operation ‘A’ surely disables operation ‘B’ we can assume that ‘B’ is disabled at each state having ‘A’ as incoming transition. This and other such relations can be used to optimize the ProB model checker for exhaustively checking B models. This type of relations we will also call enabling relations.
Enabling relations between operations reveal how operations of a given B model could influence each other with regard to enabledness. In other words, we are interested in the effect of executing one operation Op1 on the status of the guard of another operation Op2 for each pair of operations (Op1,Op2) of the underlying B model. The effect of an operation Op1 can affect the guard of another operation Op2 in various ways:
- Op1 enables Op2, or
- Op1 disables Op2, or
- Op1 keeps Op2 enabled respectively disabled;
This enabling relation of two operations we can illustrate, for example, as follows:

where the green boxes denote that the evaluation of the guard of Op2 is true, whereas the red boxes indicate that the evaluation of the guard of Op2 is false.
The model checker optimization, partial guard evaluation, makes use of such a kind of relations. The enabling relations are determined by means of syntactic and constraint-based analyses. In particular, we concentrate on three kinds of enabling relations:
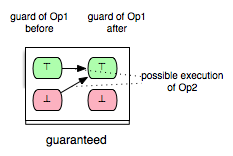
Op2 is always enabled after the execution of Op1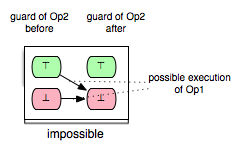
Op2 is impossible to be enabled after the execution of Op1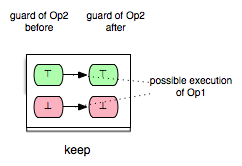
Op1 keeps Op2 enabled respectively disabled



Consider the B machine below modelling an algorithm for mutual exclusion with a semaphore (in the machine below this is variable y) for two concurrent processes and . Each process has been simplified to perform three types of actions: request (for entering in the critical section), enter (entering the critical section), and release (exiting the critical section).
MACHINE MutualExclusion
SETS
STATE={non_critical,waiting,critical}
VARIABLES
p1,p2,y
INVARIANT
y : 0 .. 1 & not(p1 = critical & p2 = critical)
INITIALISATION
p1, p2, y := non_critical, non_critical, 1
OPERATIONS
Req1 = PRE p1 = non_critical THEN p1 := waiting END;
Enter1 = PRE p1 = waiting & y = 1 THEN p1 := critical || y := 0 END;
Rel1 = PRE p1 = critical THEN p1 := non_critical || y := 1 END;
Req2 = PRE p2 = non_critical THEN p2 := waiting END;
Enter2 = PRE p2 = waiting & y = 1 THEN p2 := critical || y := 0 END;
Rel2 = PRE p2 = critical THEN p2 := non_critical || y := 1 END
END
Every of the both processes has three possible states that we will denote as follows: (the state in which performs noncritical actions), (the state in which waits to enter the critical section), and (representing the state in which is in the critical section). Both processes share the binary semaphore y, where y=1 indicates that the semaphore is free and y=0 that the semaphore is currently processed by one of the processes.
In the B machine the operations `Req1`, `Enter1` and `Rel1` represent the actions request, enter and release of , respectively. Analogously, the operations `Req2`, `Enter2` and `Rel2` represent the actions request, enter and release of , respectively. The requirement always at most one process is in its critical section guaranteeing the mutual exclusion property is stated in the invariant of the machine by means of the predicate not(p1 = crit1 & p2 = crit2).
To verify that the B machine satisfy the mutual exclusion property and has no deadlock state one can use the ProB model checker. This will explicitly generate all possible states of the machine and check whether there is any state that is a deadlock state or that violates the invariant. As a result, 8 states will be generated and checked, the machine is consistent with respect to the invariant and has no deadlock state. By the exhaustive search for error states the model checker will test by exploring the state space each guard of the machine’s operations for being enabled in the currently processed state. That is, while exploring the state space of the machine 48 guard tests (8 states 6 operations) will be performed in order to unfold the entire state space of the MutualExclusion machine.

The state space of the MutualExclusion machine is visualised in Figure 1. The symbols , and in Figure 1 denote the bindings , and (where i=1,2), respectively. Observing, for example, the operation `Req1` in MutualExclusion.mch one can easily deduce that the operations `Req1` and `Rel1` will be disabled in the after-state of each `Req1` transition. This can be simply inferred by seeing that assigning the variable p1 the constant waiting leads to a state in which both predicates p1=non_critical and p1=critical evaluate to false. That is, `Req1` and `Rel1` are impossible to be enabled after executing `Req1`. Further, since `Req1` writes only the variable p1 we can conclude that the guards of the operations `Req2`, `Enter2` and `Rel2` cannot be affected after executing `Req1`, i.e. `Req1` keeps the enabling status of `Req2`, `Enter2` and `Rel2` unchanged. These relations can be determined in ProB by means of syntactic and constraint-based analyses.
The enabling relations between the operations of MutualExclusion.mch used for the Partial Guard Evaluation optimisation are summerised in the table below. The enabling relations guaranteed and enable indicate the cases when the guard of an operation is guaranteed enabled after the execution another operation and when an operation can be enabled after the execution of another operation but the enabledness is not always guaranteed, respectively.
| Origin | Req1 | Enter1 | Rel1 | Req2 | Enter2 | Rel2 |
| Req1 | impossible | enable | impossible | keep | keep | keep |
| Enter1 | impossible | impossible | guaranteed | keep | impossible | keep |
| Rel1 | guaranteed | impossible | impossible | keep | enable | keep |
| Req2 | keep | keep | keep | impossible | enable | impossible |
| Enter2 | keep | impossible | keep | impossible | impossible | guaranteed |
| Rel2 | keep | enable | keep | guaranteed | impossible | impossible |
Let us now consider state in Figure 1 that we assume to be yet not explored by the model checker. is an after-state of `Req1`. Using the enabling relations that we have established we can infer that `Req1` and `Rel1` are disabled at since both are impossible to be enabled in each after-state of `Req1`. Further, we can omit the tests of the guards of `Enter2` and `Rel2` since both operations are disabled in and we already have shown that `Req1` cannot change the status of the guard of both operations. As a result, we can skip the test for enabledness for `Req1`, `Rel1`, `Enter2` and `Rel2` in . The test of the guard of `Req2` can also be omitted since `Req2` is enabled in and thus also enabled in as `Req1` keeps `Req2` enabled. Summarizing these results, it is thus necessary to test only the guard of `Enter1` in as we could determine the status of the guards of the residual operations via the enabling relations that we considered previously.
Partial guard evaluation (PGE) makes use of the enabling relations. Above we described how guard tests can be saved up aiming to optimise the exploration of the state space and thus to provide smaller model checking times for B models, as well as for Event-B models. The optimisation can be enabled using the preference ('-p') option in case the command line of the ProB tool is used for model checking:
$ probcli -mc 1000000 MutualExclusion.mch -p use_pge true ********** START PGE ANALYSIS ************* ********** PGE ANALYSIS FINISHED ********** Analysis Checking Time: 40 ms. ALL OPERATIONS COVERED % All open nodes visited Model Checking Time: 10 ms (50 ms walltime) States analysed: 8 Transitions fired: 15 No Counter Example found. ALL nodes visited.
For our example, MutualExclusion.mch, the PGE analysis needed 40ms to determine the enabling relations of the machine and saved up overall 34 guard evaluations while exploring the state space of the model. ProB uses by default a mixed breath-first/depth-first search for the exploration of the state space.
The number of skipped guard tests may depend on the exploration strategy when the model checker is started with the partial guard evaluation method. To clarify this consider again the B machine formilising the mutual exclusion algorithm with semaphore for two processes. Assume first that the state space is explored in a depth-first manner and that the currently explored state is in Figure 2. Additionally, , and are the states that were explored before reaching . Before exploring state the PGE algorithm analyses which operations can be determined as disabled in using the results from the enabling analysis and observing the currently present incoming transitions of . From Figure 2 we can see that the only incoming transition of the explored state space till that moment is `Req2`. Since it is impossible for the operations `Req2` and `Rel2` to be enabled after the execution of `Req2` we can infer that both are disabled at state . Further, as `Req1` and `Enter1` are disabled at we can also assume that both operations are also disabled at , for `Req2` cannot change the enabling status of `Req1` and `Enter1`. On the other hand, `Rel1` can be considered as enabled at because of its enabledness in . In the end, we could determine that the operations `Req1`, `Enter1`, `Req2` and `Rel2` are disabled at and we could infer that `Rel1` is enabled at without testing their guards for enabledness. The only operation that we need to test for enabledness in is `Enter2`.

Let us now consider the explored state space in Figure 3. Using breadth-first search will explore all states above and until is reached. When is explored the operation `Enter1` will also be considered in the course of analysing which operations are disabled and enabled at as in the figure below state was already explored and `Enter1` is an incoming transition of . Using the results from the table above, we can infer that `Enter2` is disabled at since it is impossible for `Enter2`to be enabled after the execution of `Enter1` (see the Enabling Analysis table above). If we use the results inferred by analysing the enabling relation in regard to `Req2`, then we can conclude that all operations are disabled in except for `Rel1`. Thus, in this case we saved up one guard test more in comparison to the depth-first search example.

Model checking with partial guard evaluation usually tends to decrease more significantly the number of guards being tested using breadth-first search in comparison to the other two exploration strategies. This is due to the fact that in breadth-first search we explore all states from the current level before we begin with the exploration of the next level states. In this way, when the current state is explored the possibility that more incoming transitions are computed than other search strategies is higher.
In the table below we list some benchmarks for evaluating the PGE optimisation. The test cases with '+PGE' use partial guard evaluation as an optimisation for model checking the models. In the Skipped/Total Guard Tests column the number of omitted guard tests and the total number of guards are given.

In all test cases except for 'All Enabled' and 'Cruise Control' model checking with PGE has provided better performance results than model checking without PGE. The results show that partial guard evaluation can improve model checking up to factor 2. The larger the state space the higher is the possibility for better performance in model checking B models. For example, for 'CAN BUS' the optimisation could speed up model checking to factor 2, whereas for the 'Crusie Control' model no improvement could be detected although a significant number of guard evaluations could be saved up.
These and various other benchmarks used for evaluating partial guard evaluation (PGE) can be viewed here.
References
- ↑ E.M. Clarke, O. Grumberg, M. Minea, and D. Peled: State Space Reduction using Partial Order Reduction. STTT '98, 3, pages 279-287